
扫地机器人原理是什么?
扫地机器人使用多个传感器来感知环境。通常包括碰撞传感器(用于检测障碍物),红外传感器(用于检测墙壁和家具),跌落传感器(用于检测楼梯),激光传感器或摄像头(用于构建环境地图和定位)等。
扫地机器人的工作原理主要是通过多个传感器和算法的组合,实现智能化的清扫工作。以下是常见的扫地机器人的工作原理:
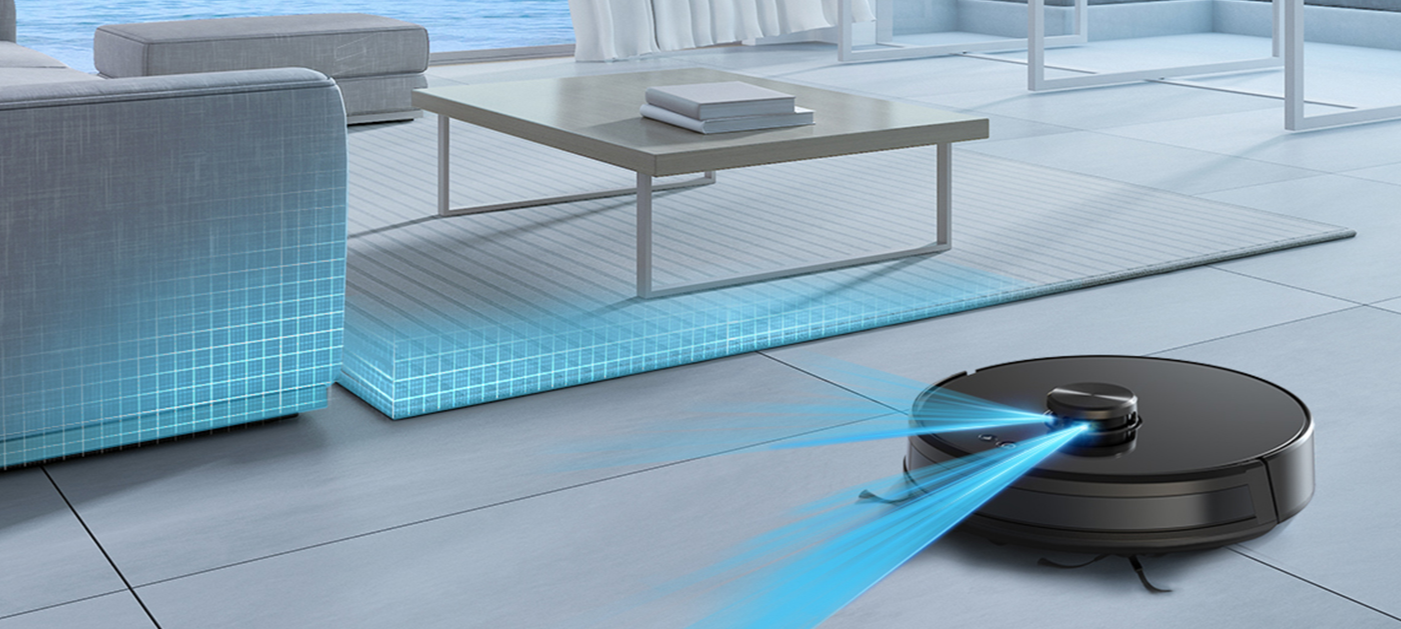
1. 环境感知:扫地机器人使用多个传感器来感知环境。通常包括碰撞传感器(用于检测障碍物),红外传感器(用于检测墙壁和家具),跌落传感器(用于检测楼梯),激光传感器或摄像头(用于构建环境地图和定位)等。
2. 地图构建和定位:扫地机器人使用激光传感器或摄像头等技术,将周围环境进行扫描和测量,构建一张精确的地图。利用这些地图和定位算法,机器人可以准确地知道自己在环境中的位置,并根据地图进行路径规划和导航。
3. 清扫模式和路径规划:根据地图和算法,扫地机器人可以根据不同的清扫模式(如随机模式、边缘模式、Z字型模式等)进行工作。通过路径规划算法,机器人决定如何在房间中移动,避开障碍物,确保覆盖整个清扫区域。
4. 清扫装置和操作:扫地机器人通常配备有旋转刷和吸尘装置。旋转刷在地板表面刮起灰尘和杂物,吸尘装置吸入并存储在机器人的储尘盒或储尘袋中。一些高级的扫地机器人还可以具备拖地功能,通过水箱和拖布进行地面的湿拖清洁。
5. 自主充电和续航:当扫地机器人的电池电量低下,它可以自主返回充电桩充电,并在电池充满后恢复清扫工作。机器人通常配备自动充电功能,可以在需要时进行充电,以确保持续的工作时间。
扫地机器人的工作原理和功能的实现取决于具体的产品和技术。不同品牌和型号的扫地机器人可能会有不同的设计和特点,但总体上它们都依赖于感知、定位、路径规划和清扫装置来实现自主的清扫工作。
如果想了解更多,可以关注我们:无限动力,成立于2017年,公司位于深圳市南山区源兴科技大厦,是一家专注为全球智能家居清洁提供全方位产品解决方案的高新科技企业,隶属于沃特沃德集团。
阅读全文


















请先 登录后发表评论 ~